


Autopilot i automat ciągu
Fragment książki Siergieja Amielina „Ostatni lot. Spojrzenie z Rosji”
Rozdział 10.1. Autopilot Tu-154M
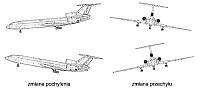
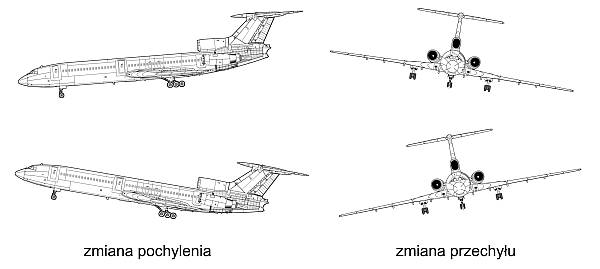
Jednym z istotnych elementów wyposażenia Tu-154M jest zautomatyzowany pokładowy system sterowania, potocznie nazywany autopilotem. Może on pracować w kilku trybach, co oznacza, że system nie zawsze zastępuje pilotów, prowadząc samolot do wytyczonego punktu, czasem jedynie pomaga im w sterowaniu maszyną. Taki tryb nosi nazwę „stabilizacji”. System utrzymuje w stanie niezmienionym jedynie niektóre parametry lotu (pozostałymi muszą sterować piloci). Może on utrzymywać stały kurs samolotu lub stabilizować jego przechył (czyli kąt przechylenia na prawe lub lewe skrzydło) podczas manewru zakręcania. Może też stabilizować pochylenie (kąt nachylenia osi podłużnej maszyny w stronę ogona lub dziobu), gdy statek powietrzny zniża się albo nabiera wysokości, żeby robił to równomiernie, czyli ze stałą prędkością pionową.
Podczas działania systemu stabilizującego lot samolotem nie daje się sterować za pomocą wolantu. Jeśli pilot poruszy wolantem (np. pociągnie go do siebie lub go odepchnie), stabilizacja się wyłączy. W zależności od tego, w jaki sposób zostanie przesunięty wolant (do siebie lub od siebie, obrót w lewo lub w prawo, oba ruchy jednocześnie), wyłączy się stabilizacja pochylenia, stabilizacja przechyłu albo oba systemy.
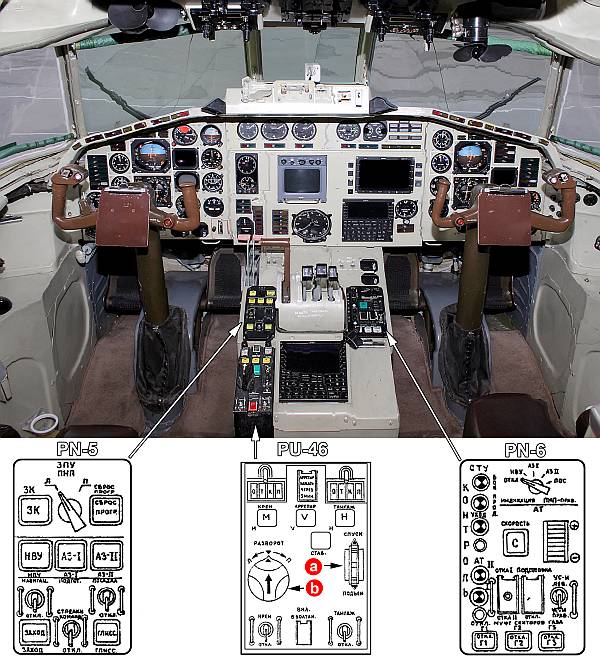
Aby jednak zmienić pochylenie lub przechył w trakcie lotu stabilizowanego przez autopilota, piloci nie muszą koniecznie dotykać wolantu i wyłączać stabilizacji. Mogą zmieniać wartości pochylenia i przechyłu, używając specjalnych pokręteł na panelu sterowania.
Kolejnym elementem zautomatyzowanego systemu sterowania jest moduł regulujący obroty silnika, aby utrzymać zadaną prędkość lotu. Tę funkcję spełnia automat ciągu. Stabilizuje on tzw. prędkość przyrządową, czyli prędkość samolotu w stosunku do otaczającego powietrza. Jeśli wieje wiatr sprzyjający, to rzeczywista prędkość samolotu (jego prędkość w stosunku do ziemi) będzie większa niż przyrządowa, jeśli przeciwny – mniejsza.
Do prawidłowego działania autopilota niezbędny jest system przyrządów (żyroskopy, prędkościomierze, wysokościomierze itd.), a także specjalny komputer pokładowy, nazywany komputerem nawigacyjnym. Na podstawie analizy sygnałów otrzymywanych z przyrządów wylicza on parametry lotu oraz poprawki, które należy uwzględnić, by statek powietrzny przemieszczał się po zadanym torze (na przykład po ścieżce schodzenia podczas lądowania automatycznego).
Samolot Tu-154M wyposażony jest w zautomatyzowany system sterowania ABSU-154-2. W jego skład wchodzą:
- system sterowania torem lotu STU-154-2,
- system sterowania automatycznego SAU-154-2,
- automat ciągu AT-6-2,
- moduł odejścia na drugi krąg.
Dzięki temu systemowi można stabilizować lot na kilka sposobów. Można też lecieć automatycznie, wzdłuż zadanego z góry toru lub kierując się sygnałami emitowanymi przez system naprowadzający znajdujący się na lotnisku (ILS). Szczegółowa charakterystyka ABSU jest dość skomplikowana i dotyczy wielu kwestii nieistotnych z punktu widzenia tej książki.
Istotne natomiast jest to, że za pomocą ABSU można stabilizować ruch samolotu w górę i w dół, czyli kontrolować jego prędkość wznoszenia i zniżania – tym steruje kanał podłużny autopilota. Można też stabilizować ruch w zadanym kierunku, żeby ten kierunek utrzymywać – tym steruje kanał poprzeczny. Oba kanały działają niezależnie. Każdy z nich można osobno włączyć i wyłączyć.
Samolot Tu-154M z numerem bocznym 101 miał na pokładzie sprzęt nawigacyjny niestandardowy dla tego typu maszyny – system sterowania lotem o nazwie UNS-1D. Jest to komputer nawigacyjny amerykańskiej firmy Universal, powszechnie stosowany w różnych rodzajach samolotów na całym świecie, ale akurat nie w Tu-154M, przynajmniej nie jako wyposażenie standardowe. W rzeczywistości w samolocie nr 101 zamontowany był nie jeden, lecz dwa takie komputery. Ponieważ szczegóły współdziałania UNS-D1 ze standardowym wyposażeniem Tu-154M nie zostały nigdzie dokładnie opisane, wśród internautów rozgorzał spór na temat dodatkowych funkcji tego systemu. Przede wszystkim spierano się, czy możliwe jest automatyczne podejście do lądowania z wykorzystaniem UNS-1D, jeśli na lotnisku nie ma systemu ILS. Po wielu tygodniach dyskusji ostateczną konkluzją było, że takie podejście jest niemożliwe i że UNS-1D służy jedynie do nawigacji w innych fazach lotu. Dodatkowo wysnuto wniosek, że w zasadzie można to urządzenie wykorzystać do utrzymania kursu samolotu podczas podejścia do lądowania (używając do tego danych otrzymanych z odbiorników GPS), ale w takiej sytuacji piloci powinni ręcznie sterować prawidłowym zniżaniem się wzdłuż ścieżki schodzenia. Przy czym to prawidłowe zniżanie można w zasadzie stabilizować za pomocą standardowych funkcji ABSU, włączając stabilizację w kanale podłużnym.
Rozdział 10.2. Możliwe konsekwencje użycia automatu ciągu
Jak wynika ze wstępnego raportu MAK, zniżanie samolotu nr 101 po ścieżce schodzenia odbywało się przy włączonym autopilocie, w kanałach: podłużnym i poprzecznym, a także przy włączonym automacie ciągu. Oznacza to, że zautomatyzowany system sterowania był włączony, działał tryb stabilizacji pochylenia i przechyłu samolotu, a także automatyczna regulacja obrotów silników, utrzymująca stałą prędkość przyrządową.
Fakt, że podczas podejścia do lądowania użyto autopilota i automatu ciągu, wywołał zdumienie wielu czynnych i byłych pilotów. Dawali temu wyraz na forach lotniczych. Zazwyczaj autopilota i automatu ciągu używa się w trakcie lądowania w trybie automatycznym – z wykorzystaniem ILS. Ponieważ jednak na Siewiernym nie było ILS, użycie trybu stabilizacji pochylenia i przechyłu było dozwolone jedynie do wysokości decyzji (dla samolotu nr 101 wynosiła ona 100 m). Jak jednak wynika z raportu wstępnego MAK, do wyłączenia autopilota w kanale podłużnym doszło „5 sekund przez zderzeniem z przeszkodą (drzewem), które zapoczątkowało niszczenie konstrukcji samolotu”. Innymi słowy, pilot pociągnął wolant do siebie dopiero 5 sekund przed zderzeniem z brzozą, na której samolot stracił końcówkę skrzydła, czyli wtedy, gdy leciał najwyżej kilka metrów nad ziemią. Stabilizacja pochylenia powinna zostać wyłączona znacznie wcześniej! Stabilizacja przechyłu też!
Pamiętajmy również, że instrukcja eksploatacji Tu-154M w ogóle nie przewiduje użycia automatu ciągu podczas lądowania bez ILS. Można go używać jedynie w trakcie lotu na wystarczająco dużej wysokości lub przy automatycznym i półautomatycznym podejściu do lądowania. Użycie automatu ciągu bez ILS może doprowadzić do katastrofy. Mówi się o tym nawet w podręcznikach dla pilotów. W Dynamice lotu i pilotowaniu samolotu Tu-154 A.I. Piatina czytamy:
Zbyt późne wyłączenie autopilota i automatu ciągu prowadzi do wypadków lotniczych i twardego lądowania, co negatywnie wpływa na poziom bezpieczeństwa lotu, zwłaszcza przy nagłym wejściu w mgłę na etapie wyrównywania. Z tego względu działania załogi w warunkach niespodziewanego wejścia w mgłę w pobliżu ziemi powinny był bardzo precyzyjne i nastawione na natychmiastowe odejście na drugi krąg. Wypracowanie takiej precyzji działań odbywa się w trakcie treningów na symulatorze.
Jak jednak wynika z raportu MAK, załoga samolotu nr 101 nie odbywała regularnych treningów na symulatorze. Podczas takich treningów ćwiczone są przede wszystkim procedury, z których korzysta się w sytuacjach awaryjnych, i wyrabianie odpowiednich nawyków. Ćwiczy się także współdziałanie w kokpicie i zarządzanie zespołem. Załoga musi wiedzieć, co należy zrobić w konkretnej sytuacji awaryjnej, kto ma to zrobić i w którym momencie.
Do czego może doprowadzić użycie automatu ciągu, w połączeniu z drobnymi błędami załogi, znakomicie pokazuje katastrofa Tu-154B-2 w Norylsku, do której doszło 16 listopada 1981 r.
Przed podejściem do lądowania załoga pomyliła się w obliczeniu masy do lądowania i położenia środka ciężkości samolotu. W rezultacie źle wyliczyła prędkość przyrządową wymaganą podczas zniżania wzdłuż ścieżki. Pomyliła się o 5 km/h, szacując ją na 265 km/h (zamiast na 270 km/h). Podejście do lądowania zostało przeprowadzone z użyciem automatu ciągu. Na lotnisku działał system ILS, a załoga zdecydowała się lądować w trybie półautomatycznym, z włączonym automatem ciągu, ale ręcznie korygując tor lotu za pomocą wskazówek nakazu wyświetlanych przez odbiornik ILS na pokładzie. W tej kwestii nie złamała przepisów.
Przelatując nad dalszą radiolatarnią prowadzącą, samolot znajdował się 18 m nad ścieżką schodzenia. Zniżał się z prędkością pionową 3 m/s. Aby wejść na ścieżkę, załoga zwiększyła prędkość pionową do 5 m/s, co spowodowało zmniejszenie kąta pochylenia samolotu; dziób się opuścił. W efekcie zaczęła rosnąć pozioma prędkość maszyny – samolot przyspieszył, bo szybciej się zniżał.
W odległości 2 km od progu pasa startowego samolot nadal znajdował się 10 m nad ścieżką schodzenia. Doszło do zwiększenia prędkości poziomej do 275 km/h. W tym momencie automat ciągu zareagował na jej wzrost i zredukował moc silników niemal do minimum (do małego gazu). To z kolei doprowadziło do przepadnięcia samolotu – pikowania i gwałtownego wzrostu prędkości pionowej.
Na wysokości 90 m nad ziemią prędkość pionowa wzrosła do 7 m/s, a samolot leciał już poniżej ścieżki schodzenia. Prędkość pionowa rosła nadal i doszła do 8 m/s, ponaddwukrotnie przekraczając wartość prawidłową.
Dowódca statku powietrznego próbował wrócić na ścieżkę schodzenia i mocno pociągnął wolant ku sobie; ster wysokości odchylił się o 21°. Jednak przy odchyleniu o kąt przekraczający 20° efektywność działania steru wysokości dramatycznie maleje, więc samolot praktycznie nie zmienił toru lotu. Nie czując reakcji maszyny, dowódca jeszcze mocniej pociągnął wolant do siebie, w wyniku czego odchylił ster wysokości do maksimum (które wynosi 29°). Mimo to tor lotu nie uległ zmianie – samolot nie słuchał steru wysokości, wychylonego za bardzo do góry, i nadal szybko się zniżał.
Na wysokości 55 m dowódca zwiększył moc silników i wydał komendę odejścia na drugi krąg. Jednak silniki pracowały na małym gazie, w który to stan wprowadził je automat ciągu, i do osiągnięcia mocy startowej potrzebowały znacznie więcej czasu niż normalnie. Stopniowo nabierały obrotów i zwiększały moc, ale działo się to zbyt wolno. Samolot nadal się zniżał, choć już nieco wolniej.
W efekcie Tu-154B-2 nie zdołał odejść na drugi krąg – zabrakło zapasu wysokości – i wylądował twardo w odległości 470 m od początku pasa startowego. W chwili uderzenia o ziemię prędkość pionowa wynosiła 4–5 m/s, zaś pozioma około 275 km/h. Samolot spadł na zaśnieżone pole i sunął po zmarzniętym gruncie, rozpadając się na kawałki; 300 m dalej zderzył się z nasypem. Od maszyny oderwały się skrzydła, kadłub rozerwało na kilka części. Zginęło 99 osób, spośród 167, które były na pokładzie.
Katastrofa w Norylsku niepokojąco przypomina tragedię smoleńską – nic więc dziwnego, że włączony automat ciągu zaczął być traktowany jako jedna z głównych przyczyn zdarzenia. Należy jednak pamiętać, że automat ciągu nie mógł być jedyną przyczyną upadku samolotu nr 101. W Norylsku przyczynił się do tego jeszcze stosunkowo niewielki błąd załogi, choć trzeba przyznać, że to właśnie użycie automatu ciągu sprawiło, iż błąd ten miał fatalne następstwa. Został on jednak popełniony na długo przed tragicznym rozwojem wydarzeń. Podczas całego podejścia do lądowania piloci postępowali prawidłowo, dlatego prokuratura umorzyła wobec nich postępowanie. Jednak, mimo poprawnego postępowania załogi na etapie zniżania, doszło do katastrofy – co po raz kolejny dowodzi, że w lotnictwie nie ma czegoś takiego jak nieistotne drobiazgi.
Bardzo ciekawe są komentarze Jurija Darymowa, który analizował dokumenty śledztwa w sprawie katastrofy norylskiej, znajdujące się w archiwum państwowym:
Wszystko zostało starannie zarejestrowane i złożone w spójną całość, każdy wątek śledztwa zakończono wnioskami. Załoga w normie, samolot i silniki w normie, pogoda w normie, lotnisko w normie, podejście do lądowania w normie. Tylko ślad toru lotu na ścieżce (na radarze lądowania) od wysokości decyzji ostro spada w dół, dochodząc do ziemi.
Zastępca ministra lotnictwa cywilnego ZSRR, Borys Grubij, tak komentował tragedię w Norylsku:
Katastrofa to wydarzenie zachodzące w czasie i przestrzeni. Jest ono spowodowane poprzedzającymi je zdarzeniami i uwarunkowane sumą najróżniejszych czynników, które nakładają się na siebie w jednym miejscu i czasie. Tak stało się i teraz: przedni przedział bagażowy był przeciążony, przez co środek ciężkości samolotu przesunął się ku przodowi, do samego krańca dozwolonych wartości; załoga utrzymywała zadaną prędkość, ale ster wysokości okazał się nieefektywny, doszło do pikowania. Załoga w tym przypadku nie ponosi winy za zaistniałą sytuację. Pilotowi zabrakło czasu i wysokości, żeby zapobiec upadkowi maszyny. Próbował, ale zniżanie okazało się nie do pokonania. Do tragedii doszło na skutek udziału czynnika ludzkiego – jednak nie w trakcie lotu, jak przyjmowano początkowo, lecz podczas projektowania samolotu i podczas jego załadunku w punkcie wylotu.
Być może przyczyn katastrofy samolotu nr 101 również nie należy szukać wyłącznie w działaniach (bądź ich braku) w ostatnich minutach i sekundach lotu. Scenariusz tragedii mógł zostać uruchomiony znacznie wcześniej, tworząc łańcuszek okoliczności, które doprowadziły do nieszczęścia.
Po wydarzeniach w Norylsku wprowadzono zmiany w instrukcji eksploatacji samolotu Tu-154, zmniejszono zakres dopuszczalnych położeń środka ciężkości, zwiększono prędkość lądowania. Dodatkowo wprowadzono modyfikacje w konstrukcji samolotu, zwiększono płaszczyznę sterów wysokości i całego statecznika poziomego, aby wzmóc ich efektywność. Możliwe, że również w oparciu o wnioski z katastrofy samolotu nr 101 pojawią się nowe zalecenia i nie wykluczam, że będą one dotyczyć nie tylko technicznych, ale również organizacyjnych i prawnych kwestii przeprowadzania podobnych lotów.
Podczas badania katastrofy norylskiej jako błąd załogi wskazywano nieprawidłowe ustalenie prędkości – różnica wynosiła 5 km/h. Jednak w instrukcji eksploatacji Tu-154M wyraźnie napisano, że automat ciągu może utrzymywać prędkość z błędem plus minus 20 km/h, co oznacza, iż prędkość jest utrzymywana z dokładnością znacznie mniejszą niż konieczna podczas lądowania!
Instrukcja eksploatacji każdego samolotu w locie jest dla pilotów dokumentem podstawowym, a w tej dla Tu-154M zapisano wyraźnie, że z automatu ciągu podczas podejścia do lądowania można korzystać tylko w trybie lądowania automatycznego – w obecności ILS, lub półautomatycznego – według wskazówek nakazu. W pierwszym przypadku pilot włącza ABSU, w drugim natomiast steruje ręcznie, ale korzysta przy tym ze strzałek nakazu wyświetlonych na monitorze na przednim panelu, które wskazują mu, w jakim kierunku powinien poruszyć wolantem. Oba te tryby lądowania są możliwe tylko w obecności ILS.
Wprawdzie w opisie technicznym ABSU-154-2 wymieniona jest dokładność stabilizacji prędkości przyrządowej na poziomie ±5 km/h, ale to nie wystarcza. Nie bez powodu instrukcja eksploatacji zabrania używania automatu ciągu przy braku ILS. Najwyraźniej, wobec niewystarczającej dokładności automatu ciągu, jego użycie w trakcie lądowania stanowi realne zagrożenie.
Zapewne katastrofę samolotu nr 101, podobnie jak katastrofę w Norylsku, spowodowała nie jedna przyczyna, lecz splot różnych okoliczności, a włączony automat ciągu wydaje się jego bardzo prawdopodobnym elementem. Automat ciągu może w pewnych warunkach zredukować obroty silnika do granicznie niskich wartości, a wtedy moc startową osiąga się z dużym opóźnieniem – silniki potrzebują czasu, by osiągnąć odpowiednie obroty. To opóźnienie może okazać się fatalne – maszyna może nie zdążyć odejść na drugi krąg.
Tę hipotezę zdają się potwierdzać informacje opublikowane w polskich mediach na początku maja 2010 r., jeszcze przed wstępnym raportem MAK. Wynika z nich, że obroty silników samolotu nr 101 przed przejściem w tryb startowy wynosiły 60% maksymalnej wartości, co odpowiada małemu gazowi. Mniejszych obrotów podczas lotu w ogóle nie da się ustawić, gdyż silnik mógłby zgasnąć. Sterując ręcznie, piloci nigdy nie schodzą poniżej 70%. Tak niskie obroty mógł więc ustawić jedynie automat ciągu, próbując zmniejszyć prędkość samolotu.
Przyczyn nadmiernej prędkości poziomej prezydenckiego tupolewa mogło być kilka. Hipoteza podstawowa brzmiała – samolot początkowo leciał powyżej ścieżki schodzenia, a później, przy gwałtownym zejściu, rozpędził się do prędkości, która spowodowała przejście silników na mały gaz (analogicznie do katastrofy w Norylsku). Tę wersję częściowo potwierdza upubliczniony stenogram z rozmów w kokpicie.
W raporcie MAK nie wspomina się o środku ciężkości samolotu; zrodziło to sugestię, że mógł on być przesunięty za bardzo do przodu, jak w tupolewie z Norylska. U podstaw tego przypuszczenia legła informacja mediów, że w tylnej części kabiny pasażerskiej samolotu nr 101 znajdowały się wieńce, które delegacja miała tego dnia złożyć na polskim cmentarzu wojskowym w Katyniu. Media spekulowały, że dziennikarze polecieli innym samolotem, Jakiem-40, gdyż właśnie z powodu wieńców nie wystarczyło dla nich miejsca w Tu-154M.
Wieńce ważyły znacznie mniej niż pasażerowie, siedzący w przedniej części kabiny, i dlatego dziób samolotu był cięższy. To właśnie mogło spowodować nadmierne przesunięcie środka ciężkości maszyny ku przodowi. W takiej sytuacji, przy nieprawidłowym ustawieniu statecznika poziomego do lądowania, mogłyby wystąpić warunki znane ze scenariusza katastrofy norylskiej i ster wysokości przestałby działać efektywnie z powodu zbyt dużego kąta wychylenia; w rezultacie samolot straciłby sterowność i doszłoby do niekontrolowanego zniżania.
W roku katastrofy norylskiej wydarzyła się jeszcze jedna tragedia. Podczas startu z lotniska wojskowego, 7 lutego 1981 r., rozbił się samolot Tu-104. Zginęło wówczas całe dowództwo Floty Oceanu Spokojnego ZSRR – 17 admirałów i generałów – powracające z Leningradu z narady dowództwa marynarki wojennej. Oficjalnych przyczyn katastrofy nie podano do dzisiaj. Prawdopodobnie jednak maszyna spadła, ponieważ podczas startu przemieścił się ku tyłowi źle zamocowany ładunek, który przy okazji miał zostać dostarczony tym samolotem na potrzeby sztabu Floty Oceanu Spokojnego. W efekcie środek ciężkości statku powietrznego też się przesunął w kierunku ogona, nadmiernie uniósł się dziób samolotu, doszło do przekroczenia maksymalnego dopuszczalnego kąta natarcia, skrzydła przestały wytwarzać dostatecznie dużą siłę nośną i maszyna runęła na ziemię. W żargonie lotniczym zjawisko to nosi nazwę przeciągnięcia. Prowadzi ono do przepadnięcia, czyli utraty siły nośnej i wejścia samolotu w pikowanie lub korkociąg.
Rozdział 10.3. Możliwe następstwa użycia autopilota
Jak wynika z raportu MAK, na wysokości decyzji (100 m) autopilot był nadal włączony. Został wyłączony dopiero na wysokości 10 m, koło bliższej radiolatarni prowadzącej, czyli tuż przed zderzeniem z drzewem. Oznacza to, że na wysokości decyzji piloci nie przeszli na ręczny tryb sterowania. I tu pojawia się pytanie: jakie działania podjęła załoga na wysokości decyzji? Czy próbowali odejść na drugi krąg, ale z jakiegoś powodu się to nie udało? Może kontynuowali zejście poniżej wysokości decyzji i próbowali wylądować, a dopiero w ostatniej chwili spróbowali odejść na drugi krąg, co z kolei nie udało się z powodu zbyt małego zapasu wysokości?
Raport MAK nie daje odpowiedzi na to pytanie. Jest w nim jedynie bardzo ogólnikowe sformułowanie: „Do wyłączenia autopilota w płaszczyźnie podłużnej i wyłączenia automatu ciągu doszło przy próbie odejścia na drugi krąg”. Nie wiadomo jednak, w którym momencie ta próba się rozpoczęła.
Rzecz w tym, że przerwanie podejścia do lądowania nie musi wcale wiązać się z wyłączeniem autopilota – w skład ABSU-154-2 wchodzi bowiem moduł automatycznego odejścia na drugi krąg. Na wolancie piloci mają specjalny przycisk: „Odejście”. Po naciśnięciu go następuje cała sekwencja czynności wykonywanych automatycznie: manetki gazu przesuwają się do położenia startowego, silniki gwałtownie zwiększają obroty, ster wysokości również ustawia się odpowiednio. W rezultacie samolot zwiększa prędkość i gwałtownie nabiera wysokości, odchodząc na drugi krąg; autopilot i automat ciągu nadal działają i stabilizują ruch w górę. Jest tylko jeden szkopuł – nie wiadomo, czy ten przycisk działa, gdy lądowanie nie jest lądowaniem automatycznym w obecności ILS (tą kwestią zajmę się później).
Możliwe są cztery warianty rozwoju wydarzeń, a także ich różne kombinacje:
- Piloci celowo zeszli poniżej wysokości decyzji, próbując nawiązać kontakt wzrokowy z ziemią.
- Piloci popełnili błąd i przegapili wysokość decyzji. W efekcie nieumyślnie zeszli poniżej wysokości decyzji, choć nie mieli zamiaru lądować. O tym, że się pomylili, zorientowali się zbyt nisko i nie zdołali odejść na drugi krąg, gdyż uderzyli skrzydłem w drzewo.
- Piloci wiedzieli, że znajdują się poniżej wysokości decyzji, ale nie mogli zapobiec dalszemu zniżaniu się samolotu.
- Piloci próbowali wylądować, ale w trakcie wyrównania do lotu poziomego doszło do nadmiernej utraty wysokości, co doprowadziło do katastrofy.
Pierwszy wariant zakłada świadomą decyzję pilotów. Przyczyną takiego rozwoju wydarzeń jest wyłącznie czynnik ludzki.
Wariant drugi może mieć kilka przyczyn. Do pilnowania wysokości decyzji służy specjalna funkcja radiowysokościomierza. Przed lądowaniem załoga ustawia na radiowysokościomierzu wysokość, na której powinna zadziałać sygnalizacja ostrzegająca, że samolot osiągnął właśnie wysokość decyzji i że ją przekracza. Instrukcja eksploatacji Tu-154M stwierdza, że sygnalizator powinien zostać ustawiony tak, by informował o przekroczeniu wysokości decyzji, ale możliwe, że piloci samolotu nr 101 z jakichś powodów nastawili go na mniejszą wartość. I to jest pierwsza przyczyna.
Drugą przyczyną w wariancie drugim może być wpływ ukształtowania terenu. Podchodząc do lądowania od wschodu, samolot przelatywał w poprzek szerokiego parowu, którego dno znajduje się 60 metrów poniżej poziomu pasa startowego. Jeśli maszyna w chwili przekraczania wysokości decyzji znalazła się nad tym parowem, to do rzeczywistej wysokości lotu nad pasem doszła jeszcze jakaś część tych sześćdziesięciu metrów. W efekcie sygnalizacja zareagowała z opóźnieniem, gdy samolot przeleciał nad dnem parowu i znalazł się nad wznoszącym się zboczem, zbliżając się do lotniska.
Warianty trzeci i czwarty mają podobną przyczynę; różnią się tylko wysokością, na której piloci próbowali przerwać zniżanie. W pewnych warunkach samolot może kontynuować zniżanie nawet wtedy, gdy piloci próbują je przerwać i odejść na drugi krąg. Jedna z przyczyn takiego zachowania się maszyny (włączony automat ciągu) została już opisana powyżej.
Wariant trzeci może mieć inną przyczynę – niesprawność samolotu. Jednak MAK twierdzi, że maszyna była absolutnie sprawna i wszystkie jej systemy działały prawidłowo.
Do nadmiernego zniżenia się samolotu w wariancie trzecim mogło dojść z jeszcze jednego powodu. Korzystanie z autopilota może, w pewnych sytuacjach, prowadzić do katastrofy. Jak już ustaliliśmy, sterowanie ręczne przy autopilocie włączonym w trybie stabilizacji jest niemożliwe, jednak samolotem nadal można sterować dwoma pokrętłami na panelu ABSU, regulując jednym pokrętłem pochylenie (w przód i w tył), a drugim przechył (na prawe lub lewe skrzydło). Pierwszym koryguje się prędkość pionową zniżania samolotu, a drugim nakierowuje się maszynę na pas, ale wolno to robić tylko do wysokości decyzji. Potem należy przejść na sterowanie ręczne i wylądować albo odejść na drugi krąg.
Jednak ten sposób utrzymania samolotu na ścieżce schodzenia ma poważny minus. Podczas wyrównywania lotu do poziomu lub podczas odejścia na drugi krąg maszyna nie reaguje od razu, lecz potrzebuje zapasu wysokości, by wyhamować swój wcześniejszy ruch w dół i zmniejszyć do zera prędkość pionową. To zjawisko będziemy dalej, na nasze potrzeby, nazywać osiadaniem. Występuje ono zawsze. Żeby wyrównać lot podczas zniżania, trzeba poruszyć sterami oraz jednocześnie dodać gazu, bo inaczej samolot zacznie zwalniać, gdyż w locie poziomym oraz wznoszącym opór powietrza jest większy. Żeby odejść na drugi krąg, trzeba zwiększyć obroty do mocy startowej. Otóż jeśli wyrównuje się lot pokrętłem kanału podłużnego na panelu ABSU z działającym automatem ciągu, to osiadanie jest znacznie większe (trzy-, a może nawet czterokrotnie) niż w przypadku ruchu wolantem i manetkami gazu. Oznacza to, że potrzeba znacznie większego zapasu wysokości, aby taki manewr przeprowadzić w ten sposób. W dodatku wartość osiadania, czyli to, o ile metrów samolot jeszcze się zniży, zanim zacznie lecieć poziomo lub się wznosić, zależy od prędkości opadania. Im szybsze opadanie, tym większy zapas wysokości jest potrzebny. Zależność jest kwadratowa. Dwukrotne zwiększenie prędkości opadania sprawia, że do zatrzymania ruchu potrzeba nie dwa, lecz cztery razy więcej wolnej przestrzeni pod samolotem. Jeśli przed wyrównaniem na wysokości decyzji samolot nr 101 leciał z nadmierną prędkością pionową, to przy sterowaniu pokrętłami mogło mu nie wystarczyć wysokości.
Nie są to przypuszczenia czysto teoretyczne. Użycie autopilota w taki sposób doprowadziło już do wypadku lotniczego. Manewr nie został wprawdzie przewidziany przez instrukcję eksploatacji, ale, mimo wszystko, jest wykorzystywany w praktyce. Dosłownie kilka dni po opublikowaniu raportu MAK, użytkownik podpisujący się Latałem na 154-m zasugerował na jednym z lotniczych forów następujący scenariusz rozwoju wydarzeń w przypadku samolotu nr 101:
W tym samolocie był wspaniały sprzęt nawigacyjny, piloci na pewno go znali i umieli się nim posługiwać. Zaprogramowali kurs i ścieżkę schodzenia w FMS (UNS-1D) z korektą według satelitarnego systemu nawigacyjnego (GPS). System automatycznego sterowania Tu-154M pozwala ustawić automatyczne podejście według kursu i doskonale go utrzymuje, uwzględniając dryf i turbulencje przy podejściu, co zostało niejednokrotnie sprawdzone.
Jednak ścieżkę schodzenia trzeba trzymać ręcznie. Wprawdzie pokrętłem też można ją utrzymać, ale mogą pojawić się problemy. Każdy samolot osiada przy odejściu na drugi krąg – schodzi jeszcze trochę w dół, zanim przerwie zniżanie – i dopiero później zaczyna nabierać wysokości. Wartość osiadania jest różna dla różnych typów samolotów. Na Tu-154M jest mniej więcej równa kwadratowi prędkości pionowej podzielonemu na pół. Oznacza to, że przy prędkości pionowej 4 m/s będzie ona wynosić 8 m, a przy 6 m/s już 18 m – w idealnych warunkach i przy użyciu przycisku odejścia. Przy niewyważonym samolocie i nieprawidłowym odejściu wartość osiadania może zwiększyć się kilkukrotnie. Na pewno piloci samolotu nr 101 znali to zagadnienie teoretycznie, jednak wskutek niewystarczającej praktyki nie zdołali w porę zareagować.
W swoim czasie, gdy byłem pilotem instruktorem Tu-154M, oblatywałem samolot po remoncie mechanizacji skrzydeł; według programu należało zrobić po cztery podejścia z odejściem, przy różnych kątach ustawienia klap (28°, 36°, 45°).
Nieco wcześniej, w Mińsku, przy podejściu do lądowania doszło do wypadku irańskiego samolotu. Piloci lądowali z użyciem autopilota (ABSU). Kurs maszyny był utrzymywany automatycznie, zniżanie po ścieżce schodzenia regulowano pokrętłem pochylenia na panelu sterowania ABSU. W efekcie ścięli świerki przed lotniskiem, ale mimo wszystko wylądowali.
Potem samolot oddano do zakładu remontowego. Wszyscy byli zdziwieni, że się nie rozbił. Ze slotów i klap wyciągano kawałki drzew, z amortyzatorów wózka podwozia głównego wyjęto fragment świerkowego pnia o średnicy 10 cm i długości metra.
Postanowiłem sprawdzić, jak steruje się samolotem na ścieżce za pomocą pokrętła, którego zwykle używa się tylko na większej wysokości. A więc: utrzymanie ścieżki wyszło mi bardzo dobrze, ale odejście na drugi krąg, mówiąc oględnie, nie za bardzo. Przy prędkości pionowej około 3,5–3,7 m/s osiadanie wynosiło od 30 do 40 m, podczas gdy normalna wartość osiadania przy takiej prędkości pionowej wynosi nie więcej niż 8 m!
Myślę, że to właśnie przytrafiło się pilotom samolotu nr 101. Podchodzili w trudnych warunkach, bez wystarczającego doświadczenia; być może było to ich pierwsze (i niestety – ostatnie) podejście do lądowania na lotnisku wojskowym według radiolatarni prowadzących, przy braku widzialności ziemi. Szli normalnie po kursie i ścieżce. I być może udałoby im się wylądować, jednak popełnili szkolny błąd. Zaczęli patrzeć przez okna, szukać ziemi; w takich wypadkach zwykle zaczyna się zwiększać prędkość pionową. Przed sobą zobaczyli nie ziemię, lecz wierzchołki drzew, spróbowali odejść, ale użyli pokrętła i doszło do osiadania. I to był koniec.
Prawdopodobieństwo tego, że piloci samolotu nr 101 używali pokrętła, jest bardzo wysokie. To przypuszczenie jest bardzo istotną częścią składową późniejszych hipotez wyjaśniających przebieg katastrofy.
Copyright © Siergiej Amielin 2010
Siergiej Amielin „Ostatni lot. Spojrzenie z Rosji”
wyd. Prószyński Media (Prószyński i S-ka), Warszawa 2010
(rozdziały 10.1, 10.2 oraz 10.3)
tłum. Ewa Skórska
© Prószyński Media 2011–2026